|
1
|
- CS3243 Foundations of Artificial Intelligence
- (Textbook section 24.2, 24.3, 24.5, 24.6)
- Slides due to Huang Weihua
|
|
2
|
- Image formation
- Low-level Vision
- High-level Vision
- Object recognition
- Brightness-based approach
- Feature-based approach
- Application of Computer Vision
|
|
3
|
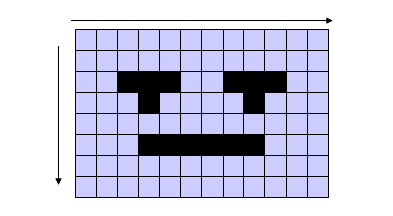
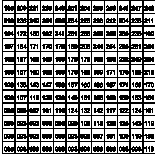
- In computer vision, an image is a two-dimensional grid of pixels.
|
|
4
|
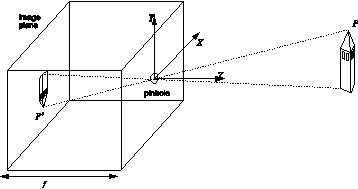
- Perspective projection: a process
of projecting an object in a scene on an image plane.
|
|
5
|
- Visible light comes in a range of wavelengths: 400 nm (the violet end)
to 700 nm (the red end).
- Discrete representation:
- Black and white (1 bit)
- Grayscale: 0-255 brightness (1 byte)
- RGB combination: each from 0-255 (3 bytes)
|
|
6
|
|
|
7
|
- Smoothing: removing extreme values from the image.
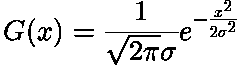
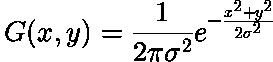
- Gaussian filter: replacing the original pixel I(x0, y0)
by summation of I(x, y)Gσ(d) over all pixels, where:
- , in one dimension.
- , in two dimensions.
- And d is the distance between pixel (x, y) and (x0, y0)
- Convolution: h = f * g (Weighted sum)
|
|
8
|
|
|
9
|
- Edge detection: finding lines and curves in the image plane that have
significant change in brightness.
- Theorem: (f * g)’ = f * g’
- Canny edge detection: combining the Gaussian smoothing process and edge
detection process.
|
|
10
|
|
|
11
|
- After edge detection, we can segment the edges into visual groups that
are single objects or parts of an object.
- Segmentation is based on similarities of certain visual properties, such
as:
- Brightness
- Color
- Texture
- Gradient
|
|
12
|
- Object recognition
- Applications: Biometric identification, content-based image retrieval,
handwriting recognition, etc.
- Approaches: brightness-based recognition and feature-based recognition.
|
|
13
|
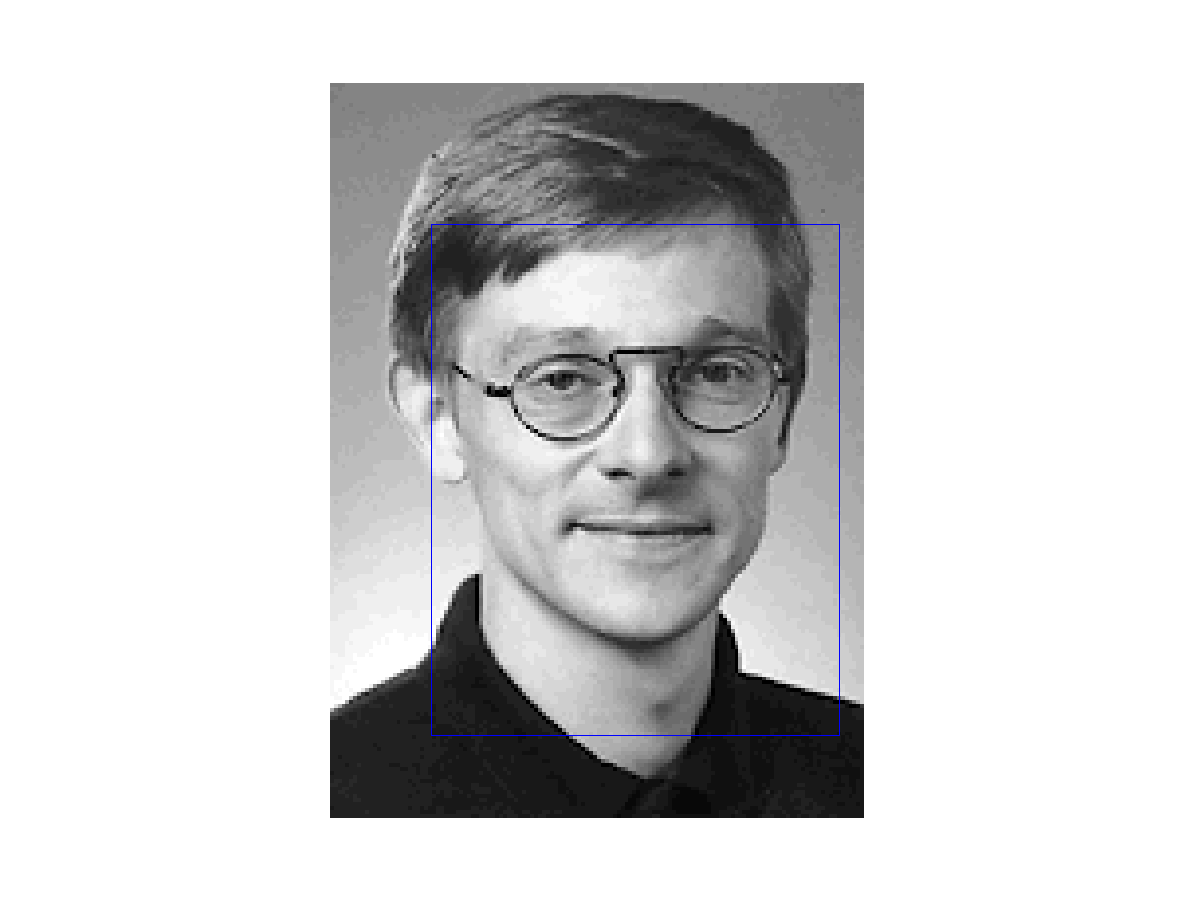
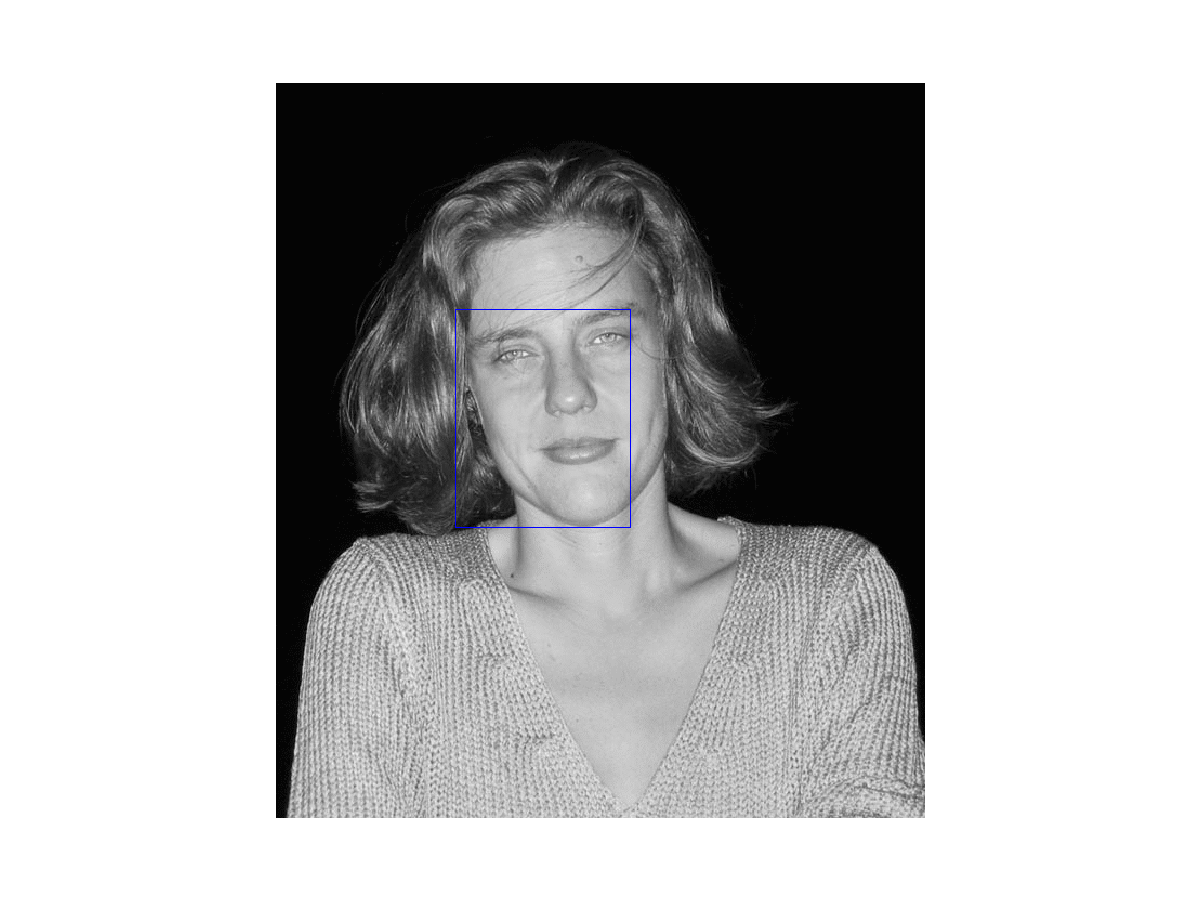
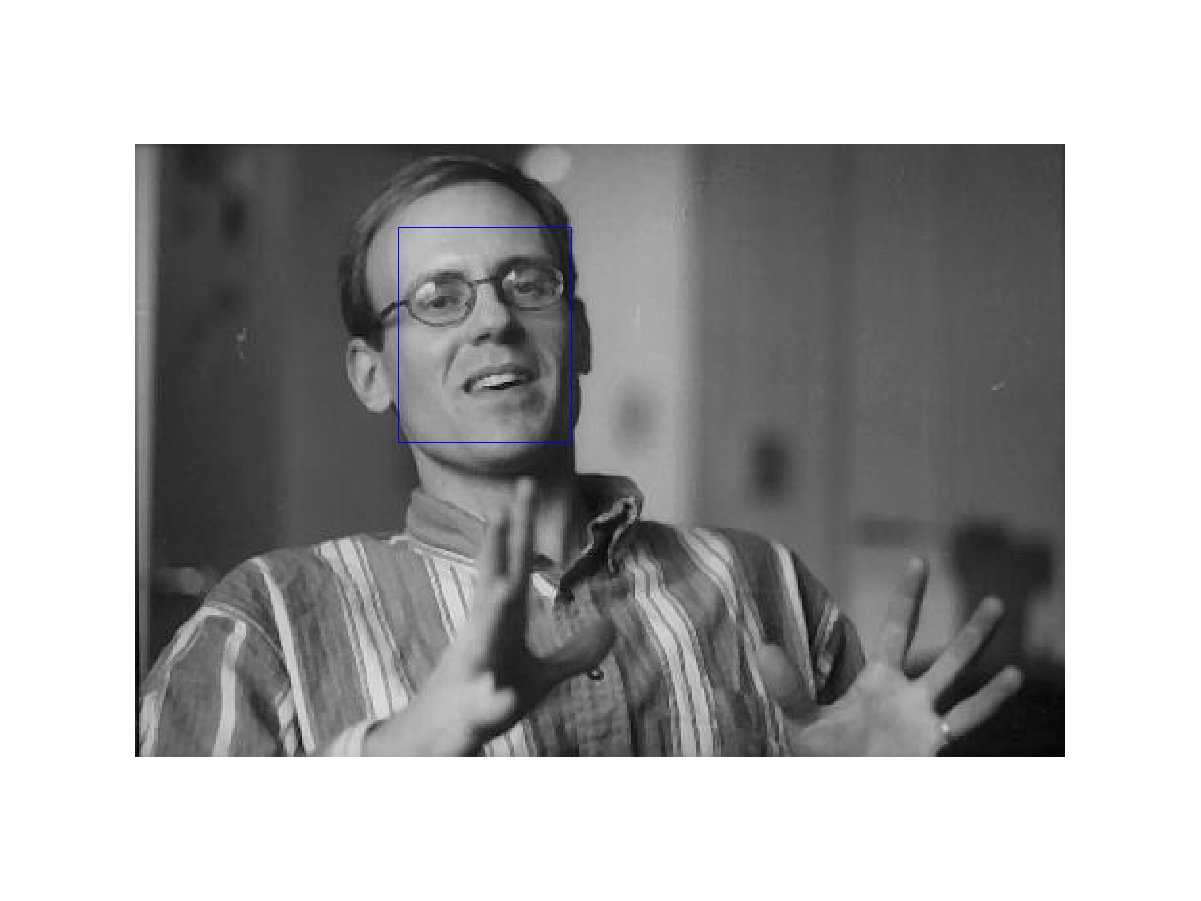
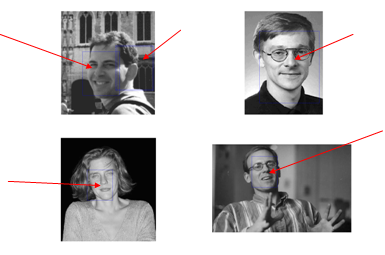
- Brightness-based recognition
- Basic feature: the brightness of pixels.
- Statistical approach to detect certain objects, such as faces and cars.
- Disadvantage: great redundancy inherent in the representation.
|
|
14
|
|
|
15
|
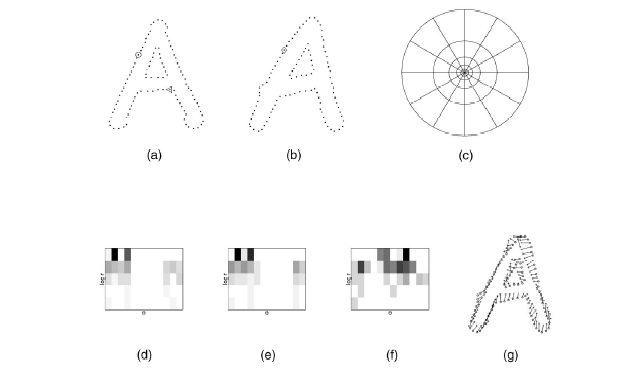
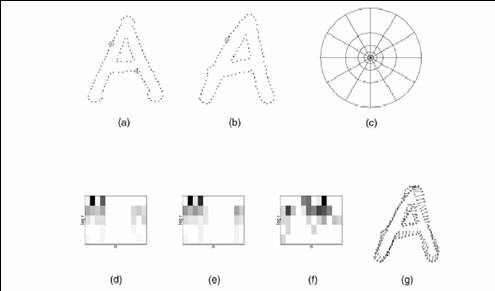
- Feature-based recognition
- Basic feature: regions and edges
- Classification approach: finding configuration of edges corresponding
to views of object.
- Deformable matching: using simple coordinate transformations.
- Shape context: arrangement of shapes.
|
|
16
|
|
|
17
|
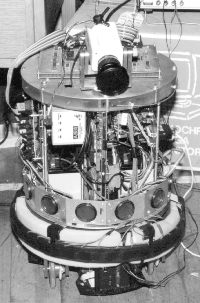
- Manipulation
- Direct processing on the objects.
- Example: manipulating engineering drawings.
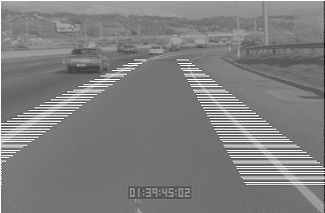
- Navigation
- Moving without colliding with obstacles.
- Example: navigation system for an auto-driving vehicle.
|
|
18
|
|
|
19
|
- You can learn more from the following modules:
- CS3241 Computer Graphics.
- CS4243 Computer Vision and Pattern Recognition.
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}