
23 February 2004
CS3243 - Optional Lecture (Robotics)
13
Robotic Perception
lBayes Network
representation
Where Ai are the actions, Xi are the states and Zi are the observations.
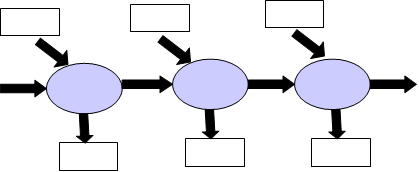
Xt-1
Xt
Xt+1
At-2
At-1
At
Zt+1
Zt
Zt-1