23 February 2004
CS3243 - Optional Lecture (Robotics)
21
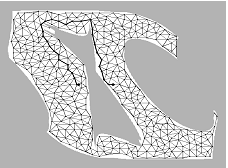
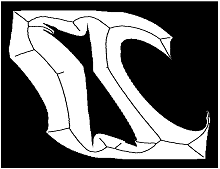
Motion Planning
l
Example: