Tree search
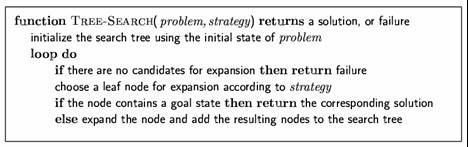
| Tree search is the basic
algorithm in which we can change into other uninformed and informed searches
based on what methods we use to decide which candidate to expand. Initially only the initial state is in the
search tree as a simple. The above
figure used in the slides is the English version of the pseudo code version
on pg 72. |
|
| In both, the current node is
checked to see whether it is a goal state.
If so, the solution is returned (the path through the tree). Otherwise the node is expanded and its descendents
placed into the fringe in some order.
The specific order is important and subject to the strategy employed
by the agent (e.g., DFS, BFS, etc.). |
|
| Note that the ordering the
nodes in the fringe can be done in the REMOVE-FIRST, INSERT-ALL stages. The EXPAND function itself cannot do this
entirely by itself as it does not have access to the fringe, merely the set
of successors that it generates. |
|