| Motivation |
| |
Surveillance cameras are becoming an important asset in
homeland security. Many large cities have installed surveillance
cameras along city streets to monitor and record human
activities. The recorded videos provide valuable information
to the police for solving crimes ranging from theft
to terrorist activities. To use the information in the videos,
it is necessary to sieve through the videos manually to identify
the relevant video segments. A computer system for
automatic analysis of videos will save a lot of manual effort.
An important surveillance application is to track the motion
of an object of interest, e.g., a car or a human, using one
or more cameras, and plot the motion path in a city map.
This is not a trivial task because the cameras are typically
located sparsely in the city area and they do not overlap in
camera views. So, well-known techniques such as multiple-view
geometry does not work at all. A novel technique needs to be
develop to achieve the goal. |
| |
|
| Research Goal |
| |
Our research goal is to develop a framework for city-wide surveillance with multiple cameras. This involves solving several tasks:
> Localization of cameras in city map
> Tracking of moving objects over multiple non-overlapping cameras
> Analysis of motion paths
> Detection of abnormal motion and behavior over wide area |
| |
|
| Localization of Cameras in City Map |
| |
Given n pairs of corresponding 3D positions
and 2D image positions, where the 3D points are approximate, apply an iterative algorithm to determine the location and orientation of a camera in a city map. The difficulty and challenge of this problem is that a camera view is more or less orthogonal to the city map. So, there are very few common features between
the two views for a computer vision algorithm to correctly
identify corresponding points automatically.
|
| |
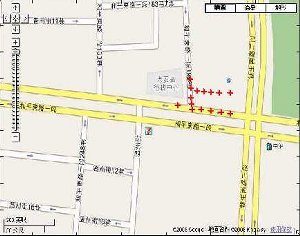
Sample Results
| Input: approximte corresponding points in city map and camera view are marked with red crosses. |
|
|
City map |
Camera view |
| |
|
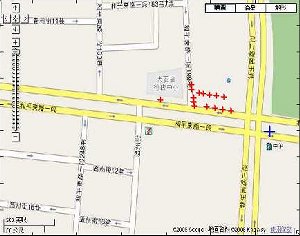
| Output: Camera position is marked with blue cross in city map. Corresponding points are well mapped through the recovered camera position and orientation. |
|
|
City map |
Camera view |
|
| |
|
| Researchers |
| >> |
A/Prof. Leow Wee Kheng, Dept. of Computer Science, Natioanl University of Singapore |
| >> |
Dr. Cheng-Chieh Chiang, Dept. of Information Technology, Takming University of Science & Technology, Taiwan. |
| >> |
Yi-Ping Hung, Dept. Computer Science & Information Engineering, National Taiwan University, Taiwan |
| |
|
| Publications |
| >> |
W. K. Leow, C.-C. Chiang, and Y.-P. Hung. Localization and Mapping of Surveillance Cameras
in City Map, Proc. ACM Int. Conf. on Multimedia, 27 Oct 27- 1 Nov 2008. |